This article will give all our readers a basic idea of what exactly is Haptic technology. My aim is to open up possibilities of haptic technologies in the fields of art, design, and education. To attract the interest of potential users of haptics like educators, and students, it’s necessary to provide easy-to-make and easy-to-use haptic devices. as technology is a hot favourite topic in today’s robotic world. Lets start with the defination.
‘Haptic technology’ refers to as a phenomenon dependent on a concept called TechTile. It is a fundamental concept that combines “TECHnology” with “tacTILE” recognition and expression. The tactile feedback technology takes advantage of the sense of touch by applying forces, vibrations, or motions to the dedicated user. It adds sense of touch to virtual environments. Here, the users are given the feel that they are touching a physical object . Haptic technology has made it possible to investigate how the human sense of touch works by allowing the creation of carefully controlled haptic virtual objects.

Human beings have a multitude of senses. Sight (ophthalmoception), hearing (audioception), taste (gustaoception), smell (olfacoception or olfacception), and touch (tactioception). Amongst these we can now successfully record, store and reproduce sound and still & moving images.Now its time to deal with touch.
In our childhood, we have seen transmission of sound using two paper cups connected by a string. Similarly transmission of vibrations is now possible.
Just like HD or the new 3D glasses enhances how and what we see and that data is delivered to our brain for processing, haptics does the same for touch. Haptic devices provide physical information that is delivered to our brain to help us “see” or experience something in more depth. It is just one of the increasing ways humans and computers are growing closer beyond just simple word processing and number crunching. As the 21st century progresses, the exchange of information between our brains and computers is becoming closer and more complex and through haptics it can physically manifest itself to aid and improve our lifestyle.
Haptics have been able to develop over the years as computer technology has become more advanced and computer chips and sensors have gotten small enough to be incorporated into everyday objects. These everyday objects then become much more powerful tools.
Haptics word originates from the Greek word ἁπτικός (haptikos), meaning pertaining to the sense of touch and comes from the Greek verb ἅπτεσθαι (haptesthai) meaning to “contact” or “touch”.
Most mechanical stimulation are used to assist in the creation of virtual objects which helps in controlling of such virtual objects and so as to enhance the remote control of machines and devices (teleoperators)
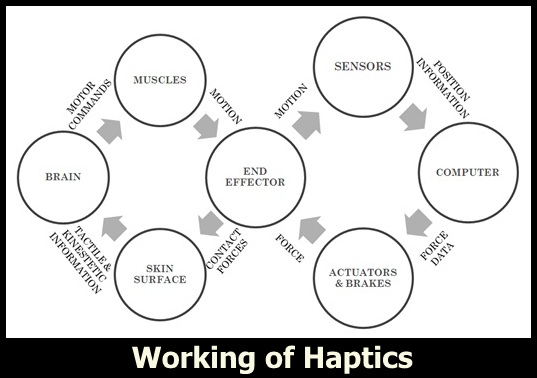
Basically a haptic system consist of two parts namely the human part and the machine part. The above figure shows, the human part (left) senses and controls the position of the hand, while the machine part (right) exerts forces from the hand to simulate contact with a virtual object. In terms of human system, all the nerve receptors perform required sensing, the brain performs processing and all muscles perform actuation. All these functioned by encoders, computer and motors respectively for machines. The actuator provides mechanical motion in response to an electrical stimulus.
Many designs of haptic feedback used electromagnetic technologies such as vibratory motors, same as vibrating alert in a cell phone or a voice coil in a speaker. Here a central mass is moved by an applied magnetic field.
TECHTILE TOOLKIT
The TECHTILE Toolkit is a haptic rapid-prototyping device that fulfills this requirement. The current system is composed of a haptic recorder (microphone), some haptic reactors ( vibrators), and a signal amplifier low-frequency vibrations.

For example, if you want to deliver the haptic sensation of glass balls in a cup, we just need to use Scotch tape to attach the haptic recorder to the bottom of a paper-cup along with the haptic reactor on the bottom of another cup. When we drop balls in the cup with the haptic recorder attached, the haptic sense of collision and rotation of balls is copied to another cup in real time.